Home >> 研究設備

 |
積雪寒冷地用移動ロボット(除雪機を利用し自作)ゲームパッドを用い,ブラウザから遠隔制御できますが,自律機能も備えた半自律制御により,移動します. |
 |
ロボットアーム(PA10:三菱重工)人と同じ7自由度の関節を持つロボットアームです。VisualC++等のプログラムで、コンピュータから制御できます(開発研究室IIで使用)。 |
 |
筋電計測装置(Personal EMG:追坂電子機器)乾式電極を用いて、8ch同時に筋電位を計測できます。計測した筋電位信号はA/D変換ボードで取り込みます。 |
 |
移動ロボット(リバスト)P3-DX8は、ロボットハンド、ステレオカメラを装備した移動ロボットです。Linuxを搭載しているので自律走行ができます。 |
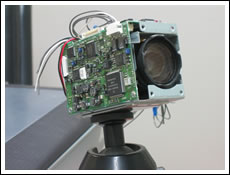 |
CCDカメラ(SONY)コンピュータと接続し、ロボットビジョンの研究に使用します。三河研究室には多数あります。 |
 Copyright (C) 2005-2016 三河研究室 All Rights Reserved.
Copyright (C) 2005-2016 三河研究室 All Rights Reserved.