
寒冷積雪地方のための地域情報提供移動ロボットの研究・開発
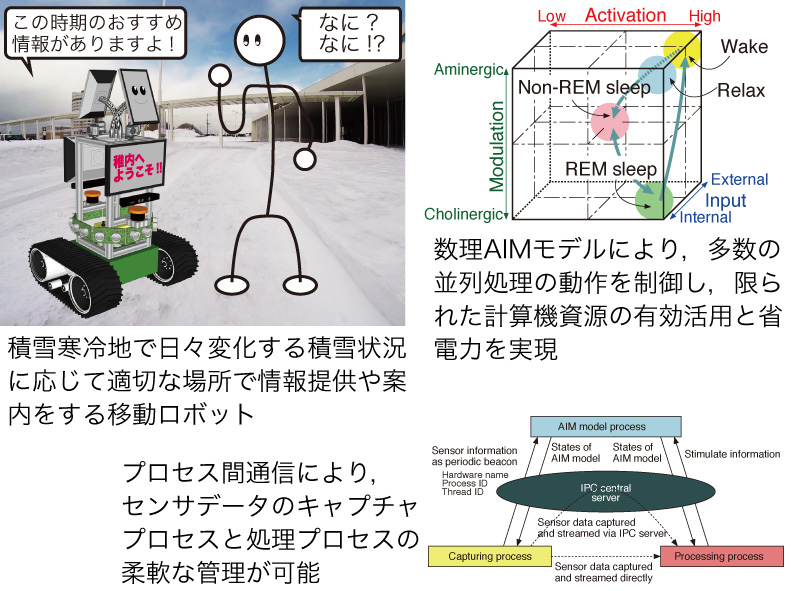
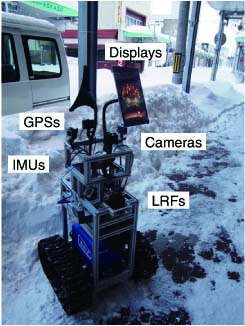
地域情報アーカイブと移動ロボットの組み合わせにより,積雪地帯における観光客および地域住民に対する移動式情報提供システムの構築を目指しています.北海道稚内市の駅前および駅前商店街を実験フィールドとし,稚内北星学園大学と中部大学との共同研究を行っています.オペレータにとって簡便な半自律遠隔操作技術の確立ににより,高い安全性,利便性,実用性を実現するシステムを目指しています.
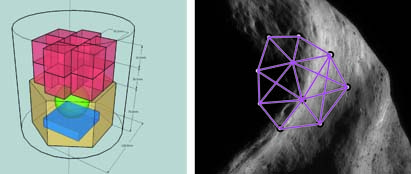
センサネットワークを利用した小惑星探査ロボットの研究・開発
2014年に打ち上げ予定の小惑星探査機「はやぶさ2」には,小惑星に降りて表面を探査する小型ロボット「MINERVA-II」が搭載されようとしています.JAXA,大阪大学,東京電機大学との共同研究で,ネットワーク接続された複数の小型ロボット群を用いて,小惑星表面を移動しながら効率良く探査が可能で,かつ,トラブルに対して頑健なシステムの研究・開発を行っています.果たして,宇宙へ行けるのか!? -> 残念ながら最終選考で落ちてしまいました.現在は,次の探査を目指して,研究を続行しています.遺伝的アルゴリズムによる小型ロボット間の相対位置姿勢推定,機械学習によるロボットの姿勢推定等,人工知能技術の活用による研究を進めています.
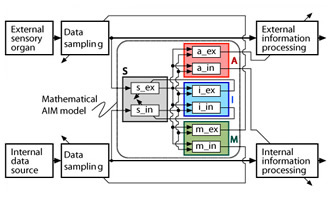
人間の睡眠覚醒機能に基づく並列知覚情報処理システムの研究
柔軟な知覚情報処理系を有するロボットを構築するために、人間の意識状態、特に睡眠/覚醒状態を数理モデルとして表現する研究を進めています。本数理モデルを利用することにより、覚醒時には外部(視覚や聴覚)情報を主に処理し、睡眠時には内部(蓄積)情報を主に処理したり、処理を休止したりすることができる動的な情報処理系の構築が可能となります。その結果、限られた計算機資源を有効に利用することができるようになります。
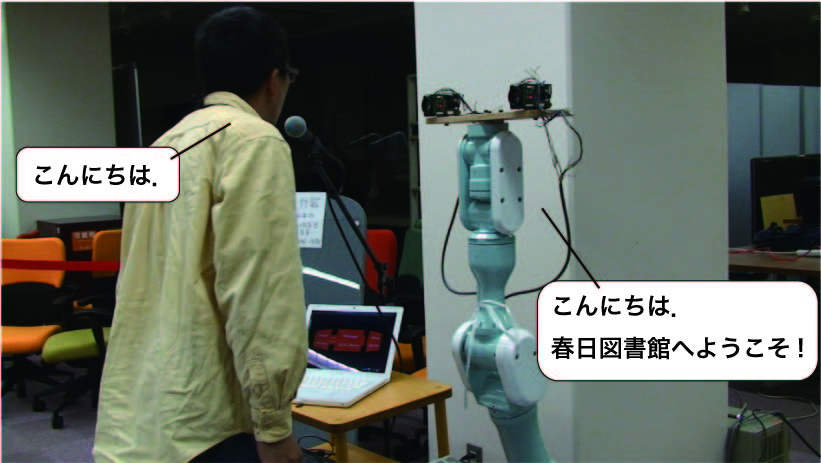
図書館司書ロボットの研究
図書館利用者と会話することができ、館内の案内や蔵書の検索等の機能を有します。また、たくさんの外界センサを備える図書館司書ロボットの知覚情報処理系は、上記の睡眠覚醒機能に基づき制御され、図書館利用者がロボットの周りに居ない時には、外見上は居眠りをしているように見え、内部では覚醒時に蓄積したセンサ情報等の解析を行うといったユニークなロボットです。限られた計算機資源を有効に利用しつつ,居眠りすればするほどますます賢くなるロボットの実現を目指しています。
筋電位信号を利用したヒューマンインタフェース
脳の運動指令が筋肉に伝えられ、筋肉が収縮する際、筋肉上に電気的な信号=筋電位信号が発生します。本研究では、皮膚表面から計測した筋電位信号を利用して、ロボットハンドや電動義手などを操作するインタフェースを開発しています。本研究では、サポートベクターマシン(SVM)を用いて筋電位信号から手の動作意図の推定を行っています。
筋電位信号によるロボットハンドの制御デモ。4つの筋電センサからの筋電位信号にもとに,7種類の動作を識別しています。
移動ロボットの遠隔操作のためのインタフェイスの研究
遠隔地にある移動ロボットを円滑に操作するためのインタフェイスやセンサの研究を行っています.単眼カメラやMicrosoft社のKinectを用いた3次元計測技術により周辺環境の3次元モデル再構築や,複数カメラを用い周辺環境のパノラマ画像の合成等,画像処理技術,画像計測技術を応用した研究を行っています.

 Copyright (C) 2005-2016 三河研究室 All Rights Reserved.
Copyright (C) 2005-2016 三河研究室 All Rights Reserved.